Epson Scara RS Spider
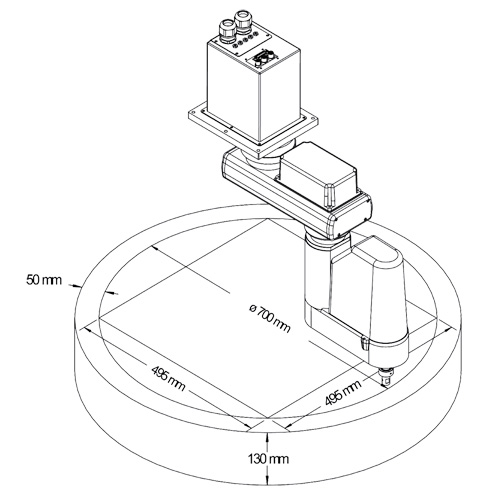
EPSON's RS-Series SCARA robots were developed to eliminate dead space, which maximizes the work space of these robots.
While standard SCARA robots have to maneuver around their base (or central padestal), the RS Spider robots can maneuver back under themselves, without constraints. As a result, the RS robots can reach every point of its their circular workspace at high speeds, carrying payloads of 3 or 4 kgs.
This innovation has reduced cycle times tremendously.
Images, videos






Specifications
| Model | RS3-351 | RS4-551 | |
|---|---|---|---|
| Robot type | 4-axis, SCARA Spider | ||
| Unique | no "dead space" in the work area | ||
| Payload | nominal / max. (kg) | 1 / 3 | 1 / 4 |
| Arm length | arm 1+2 (mm) | 350 (175+175) | 550 (275+275) |
| Z-axis length (mm) stand. / clean room |
130 / 100 | ||
| Max. speed | arm 1+2 (mm/s) | 6200 | 7400 |
| Z-axis (mm/s) | standard: 2350 clean room: 1100 |
||
| U-axis (°/s) | 2600 | ||
| Repeatability | arm 1+2 (mm) | ± 0.010 | ± 0.015 |
| Z-axis (mm) | ± 0.010 | ||
| U-axis (°) | ± 0.010 | ||
| Inertia | nominal / max. (kg/m2) | 0.005 / 0.05 | |
| Z-axis diameter | outer / inner (mm) | 16 H7 / 11 | |
| Insertion force | (N) | 150 | |
| Wiring | electrical | D-Sub: 15-pin | |
| pneumatic | 1 x ø 4 / 2 x ø 6 | ||
| Mounting | Ceiling mount | ||
| Environment | standard clean room (ISO3) and ESD |
||
| Mounting holes | 4 x ø 6,5 mm holes 190 x 160 mm |
||
| Weight | (kg) | 17 | 20 |
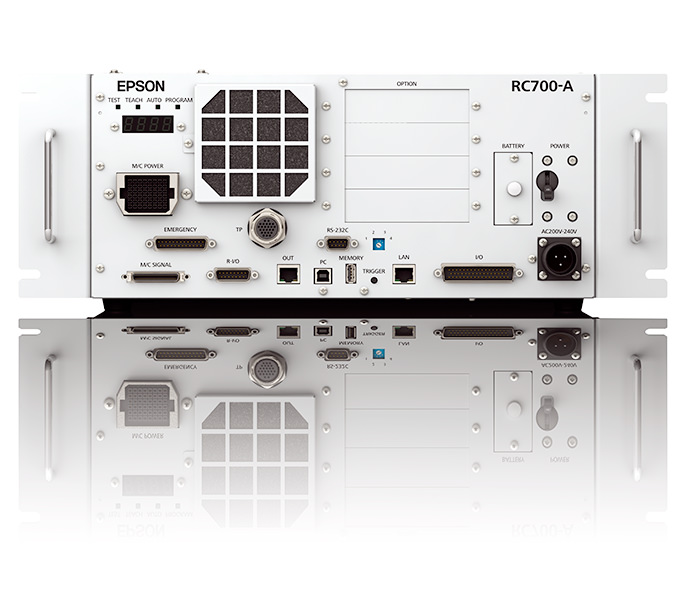
| Controller | possibilities | RC700-A controller | |
| power/signal cable (m) | standard: 3 m option: 5m, 10m, 20m |
||
| Other options | tool adapter internal wiring unit |
||
| Standard | RoHS Directive: 2002/92/EC ANSI/RIA R15.06-1999 NFPA 79 (2007 Edition) CSA/CAN Z434-03 (February 2003) EC Machinery Directive 2006/42/EC |
||
Order contents
Contents of the order
- Robot:
- the manipulator in the selected size, payload, mounting (standard, wall mount, etc.) and for the environment (standard, clean room, etc.);
- Controller:
- the new RC700 robot controller, with the servo drives for the robot, I/O connections, standard and optional communications, options and PC connectivity;
- P/S Cable:
- Power and Signal cable to connect the robot and the controller, standard length is 3 meters;
- Manuals:
- for operation, programming, service and maintenance (in English);
- RC+ software:
- complete programming environment for EPSON robots, can be installed on Windows, quick and easy to learn;
- Robot Simulator:
- 3D robot simulator on Windows;
- Options:
- additional options specific to your order (camera system, etc.);
Options
for the RC700 Robot Controller
- P/S Cable:
- longer Power and Signal cable option in 5 or 10 meter length;
- Teach Pendant:
- EPSON TP1, TP2 or TP3 Teach Pendants can be used to teach/re-teach points of the robot without the need to connect the programming PC;
- Drive Unit:
- external drive unit, to control additional robots;
- I/O option:
- additional inputs and outputs to increase the number of digital I/Os;
- Serial Connection:
- RS-232C option (with 2 channels per card);
- Fieldbus, slave:
- communication cards (slave): Profibus-DP, ProfiNet, DeviceNet, EtherCAT, Ethernet/IP, CC-Link;
- Fieldbus, slave:
- communication cards (master) with external PC: DeviceNet, Profibus, Ethernet/IP;
- Conveyor Tracking:
- conveyor tracking option, for tracking parts moving on a conveyor belt;
- Pulse Generating:
- pulse generating cards;
- Compact Vision:
- EPSON's own smart camera system that can be programmed from the robot's own software. Up to 6 cameras can be connected;
- PV1 PC Vision:
- camera recognition system for external PCs, with the ability to program from within the EPSON RC+, with up to 8 different cameras;
- OCR:
- optical character recognition;
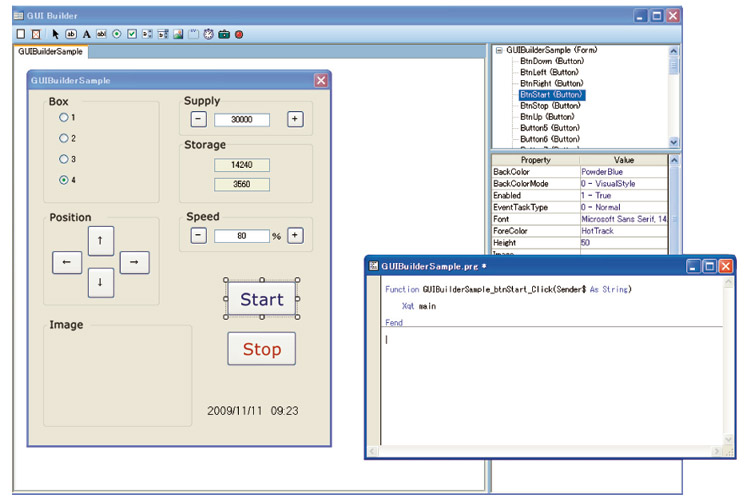
- GUI Builder:
- license to build Windows based User Interface to control the robotic cell;
- RC+ API:
- license to integrate robot controls into Your Windows applications;
- ECP:
- External Control Point license;
- Force Sensing:
- allowing real-time force sensing on the robot;
- Security License:
- ability to define different user levels, track usage (operation hours, changes, etc.);
{kind=link}
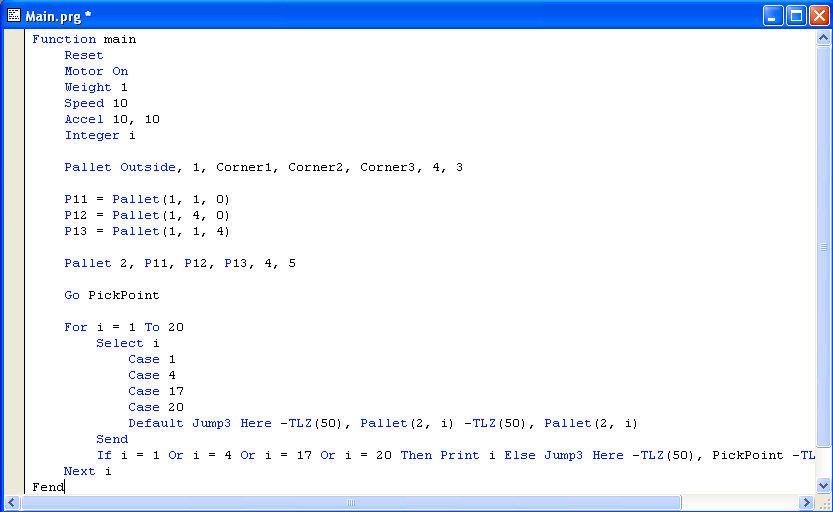
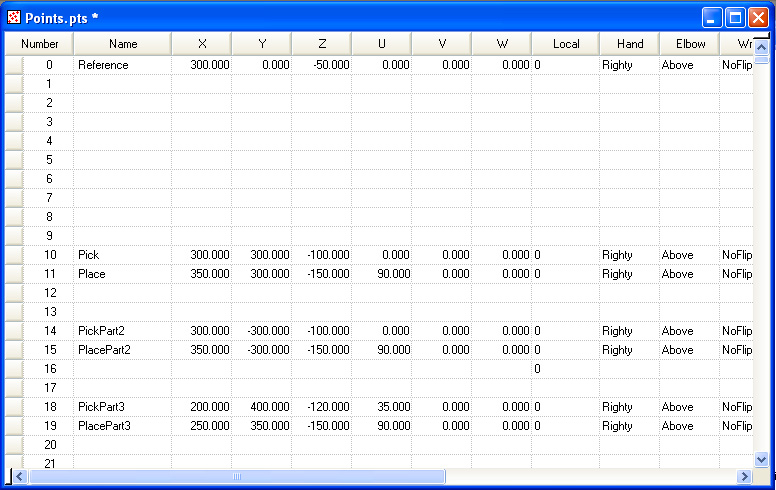
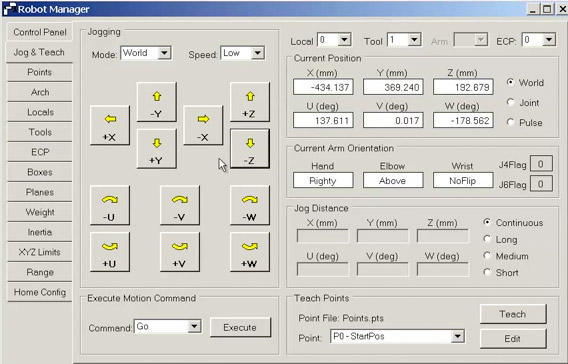
Programming
Simple to understand programming language: SPEL+
EPSON robot programming is done in a Windows-based programming environment called
EPSON RC+. The programming language itself is called SPEL+.
SPEL+ is very similar to BASIC. It is quick to learn and easy to understand. After programming
and compiling in EPSON RC+, the program is transferred to the robot controller. From that point,
the controller controlls the robot (without the need of the PC).
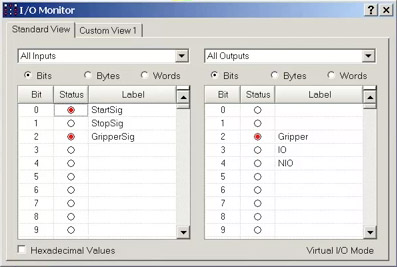
Do you need to control other devices as well? No problem. SPEL+ can do a lot more than just robot
control. It is a multitasking language, capable of controlling task parallel or independent
of the robot.
Complex motion control
SPEL+ includes a wide range ot motion commands: PTP (point-to-point motion), linear motion, CP (continuous path motion), etc. or special motion commands such as Jump or Palletizing commands.
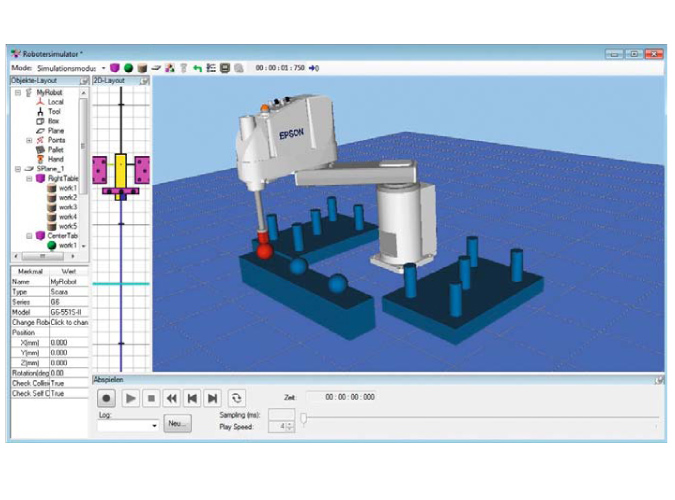
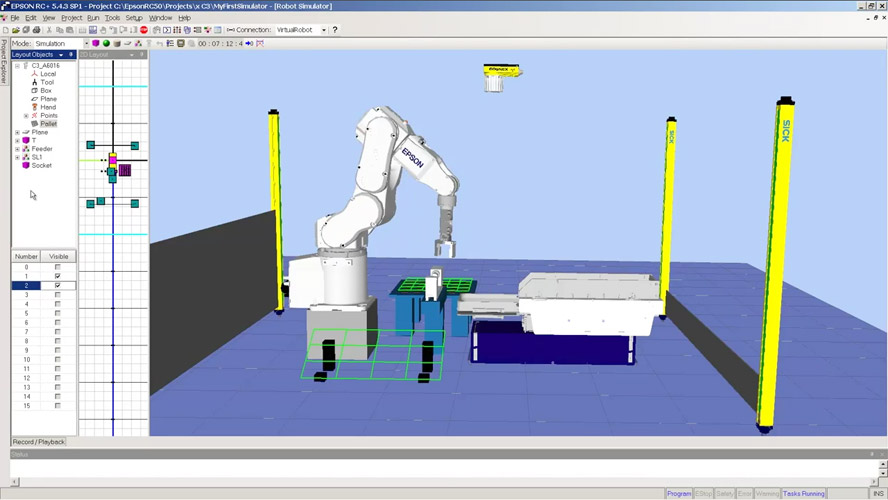
Robot Simulator, to plan ahead
With the use of the 3D robot simulator, you can plan ahead, design and simulate your application before your robot even arrives. Inside EPSON RC+ you can add 3D models to model your robotic cell, and check the cycle times. You can run study and verify your concept ideal before having to manufacture anything.
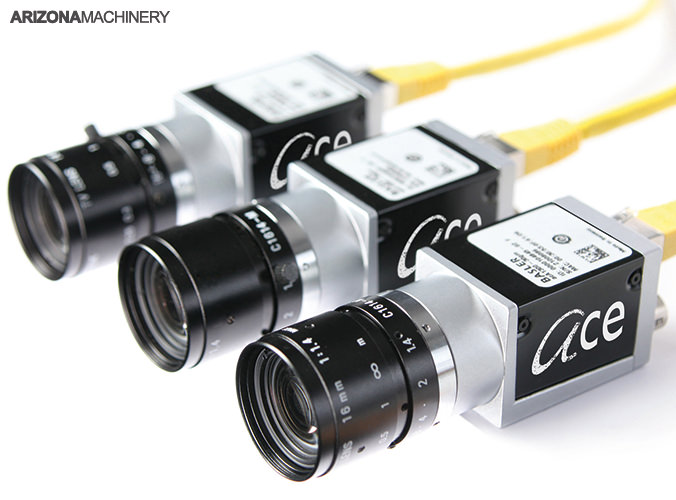
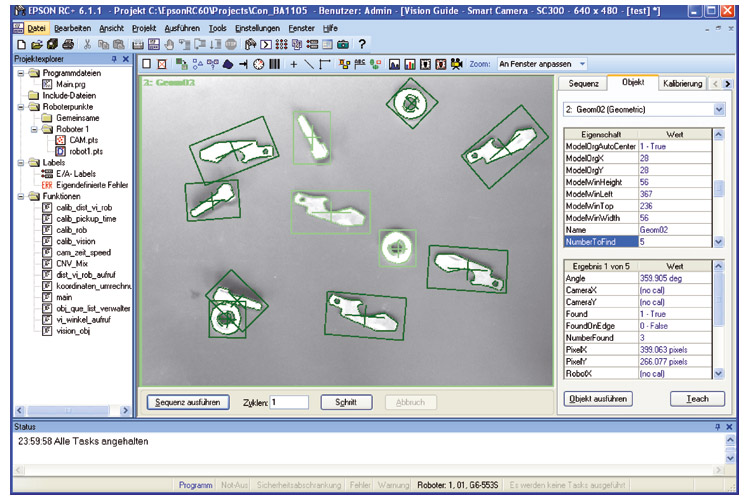
Camera Systems
EPSON's integrated vision systems
You can choose form a wide range of camera systems offered by the automation industry. But EPSON also provides its own solution. EPSON's vision systems are integrated with the robot's software, making it easy to connect and to access all the parameters and results of the camera system.
CV1, Compact Vision
The CV1 (Compact Vision) controller connects to
the robot controller via Ethernet. Programming is done from inside EPSON RC+.
The CV1 supports up to 2 x EPSON USB cameras (VGA, 1.3MP or 5MP).
CV2, Compact Vision
The CV2 connect to the robot controller via Ethernet connection. The CV2 offers quicker processing and supports high speed GigE cameras for faster data transfers. Programming is done inside EPSON RC+. The CV2 supports up to 4 x GigE cameras and up to 2 x USB cameras at the same time.
PV1, PC Vision (for RC700 only)
The EPSON PV1 is a customizable option. It is installed on a Windows PC, that connects to the robot controller. The processing speed is the function of the hardware used. The PV1 support up to 8 x EPSON GigE cameras which are available in different color modes or resolutions.
Please click here for more information about EPSON's Vision Systems.