Epson Scara G1
Seria G1 este cel mai mic membru al gamei EPSON Scara. Cu precizia deosebită a fost dezvoltată în mod expres pentru sarcini, unde locul disponibil pentru instalare este minim, în schimb cerinţele de precizie sunt înalte. Este ideal pentru aplicaţii, unde chiar şi 1/1000 mm contează (de ex. prelucrări electronice, prelucrări mecanice cu precizie, etc.).
Datorită structurii de aluminiu uşor robotul G1 este compact, masiv şi rapid. Se poate comandat cu două lungimi de braţ: 175 sau 225 mm.
După nevoie se poate comanda şi în variantă "cu 3 axe", când axa Z nu se învârte, doar se mişcă în direcţia sus şi jos.
Poze, înregistrări video









Date tehnice
| Modell | G1-171S | G1-221S | G1-171SZ | G1-221SZ | |
|---|---|---|---|---|---|
| Tipul robotului | cu 4 axe robot SCARA |
cu 3 axe (Z-axa este fix) |
|||
| Sarcină | nominală / max. (kg) | 0,5 / 1 | 0,5 / 1,5 | ||
| Lungimea braţului | braţ 1+2 (mm) | 175 (75+100) | 225 (125+100) | ||
| Lungimea axei Z (mm) standard / cameră curată |
100 / 80 | ||||
| Viteză maximă | braţ 1+2 (mm/s) | 2630 | 3000 | 2630 | 3000 |
| Axa Z (mm/s) | 1200 | ||||
| Axa U (°/s) | 3000 | - | |||
| Precizie de repetare | braţ 1+2 (mm) | ± 0.005 | ± 0.008 | ± 0.005 | ± 0.008 |
| Axa Z (mm) | ± 0.010 | ||||
| Axa U (°) | ± 0.01 | ||||
| Cuplu de inerţie permis | nominală / max (kg/m2) | 0.0003 / 0.04 | - | ||
| Diametrul axei Z | exterioară (mm) | 8 H7 | |||
| Putere de încărcare a axei Z | (N) | 50 | |||
| Cablaj | electric | D-Sub: 15-pin + 9-pin | |||
| pneumatic | 1 x ø 4 / 2 x ø 6 | ||||
| Construcţie | Fixat pe podea | ||||
| Mediul de lucru | standard sau cameră curată (ISO3) és ESD |
||||
| Găuri de montare | 4 x ø 6,5 mm găuri 125 x 88 mm |
||||
| Masă | (kg) | ~ 8 | |||
| Controler de roboţi | posibilităţi | Microcontroler RC180 sau RC620 cu controler cu PC industrial sau RC620+ cu controler cu PC industrial |
|||
| cablu alimentator/emiţător de semnale (m) | standard: 3 m opţional: 5m, 10m, 20m |
||||
| Standard | RoHS Directive: 2002/92/EC ANSI/RIA R15.06-1999 NFPA 79 (2007 Edition) CSA/CAN Z434-03 (February 2003) EC Machinery Directive 2006/42/EC |
||||
Conţinutul pachetului
Conţinutul pachetului
- Robot:
- În dimensiunea, fixarea (montat pe podea sau pe perete, etc.) şi mediul (standard sau cu cameră curată, etc.) ales de Dumneavoastră;
- Controlerul de robot RC180 / RC620:
- cu dirijarea servo, I/O, carduri de comunicare alese necesare pentru funcţionarea robotului, cu posibilitatea conectării la un PC exterior (RC180)/cu PC industrial integrat (RC620);
- Cablu de alimentare şi emiterea semnalelor:
- pentru conexiunea dintre robot şi controler robot (3 metri);
- Instrucţiuni de utilizare:
- documentaţii pentru funcţionare, programare, service şi întreţinere (engleză);
- Software RC+:
- mediul de programare al roboţilor EPSON. Software instalabil sub windows, cu limbaj de programare uşor de însuşit;
- Software de simulare:
- simularea robotului pe calculator;
- Opţiuni:
- accesorii opţionale conform comenzii;
Opţiuni
Pentru controlerele de roboţi RC180 şi RC620
- Cablu de alimentare şi de emiterea semnalelor:
- cablu de alimentare şi de emiterea semnalelor de 5, 10 sau 20 metri;
- TP1 instruire manuală:
- Suprafaţă manuală de instruire EPSON TP1 sau TP2, instruirea/schimbarea punctelor robotului fără calculator;
- CV1 Compact Vision:
- sistem inteligent de recunoaştere cu cameră video, cu camere şi lentile configurabile, programarea ale loc în mediu EPSON RC+, de unde datele se pot extrage direct;
- Completare I/O:
- lărgirea numerelor de intrări şi ieşiri;
- Conexiune în serie:
- Card de extensie RS-232 (cu 4 canale pe fiecare card);
- Fieldbus:
- carduri de comunicare (slave): DeviceNet, Profibus, ProfiNet, Ethernet IP, CC-Link;
- GUI Builder:
- în cazul unui PC exterior constituirea unei interfeţe Windows;
- VB Guide License:
- integrarea controlării roboţilor în programe pe bază de Windows;
- ECP:
- Licenţă External Control Point , urmărire cu punct exterior;
{kind=link}
Pentru controlerul de roboţi RC620
- Drive Unit:
- carcasă de propulsare exterioară, pentru administrarea altor roboţi;
- Fieldbus, master:
- posibilităţi de comunicare în cazul unui PC exterior (master): DeviceNet, Profibus, Ethernet IP;
- Force Sensing:
- măsurarea în timp real al forţei robotului;
- Conveyor Tracking:
- pachet de urmărirea benzii rulante, pentru urmărirea mijloacelor mişcătoare;
- Pulse Generating:
- card de generarea pulsului;
- Vision Guide:
- Standard: pentru sarcini standard cu cameră, pentru urmărirea unei benzi rulante lente, cu intrări pentru maxim 16 camere
Advanced: pentru urmărirea benzii rulante, cu intrare pentru maxim 6 camere;
Colour: pentru folosirea camerelor color - OCR:
- recunoaşterea optică a caracterelor;
- Security License:
- gestionarea utilizatorilor, urmărirea utilizării (numărul orelor de funcţionare, schimbări, etc.);
- Opţiune RAID:
- oglindirea HDD-ului integrat este protejat din punct de vedere a securităţi datelor (configuraţie RAID);
- Lărgire memorie:
- posibilitatea lărgirii memoriei integrate;
- Driver DVD
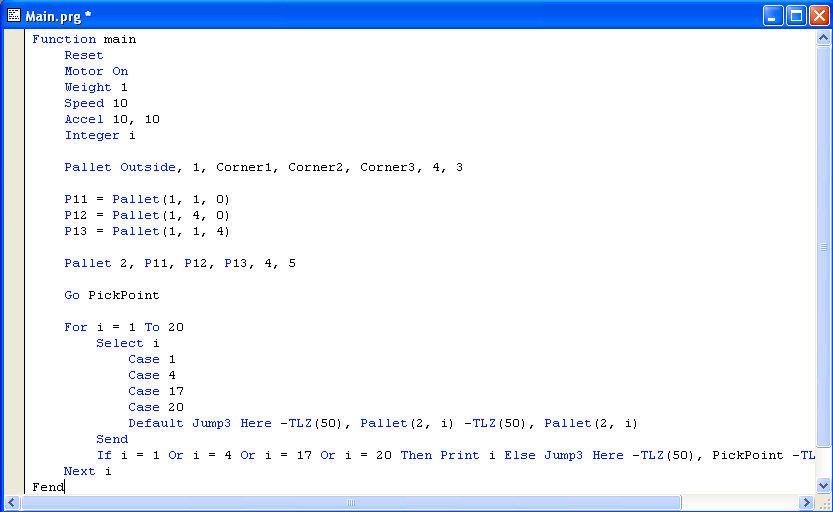
Programare
Limbaj de programare uşor de înţeles: SPEL+
Programarea roboţilor EPSON are loc în mediu de software EPSON RC+ (sub Windows).
Denumirea limbajului de programare al roboţilor este SPEL+.
SPEL+ aseamănă cu BASIC, se poate însuşi uşor şi rapid. După programare traducerea are loc în mediu
software, după ce programul este încărcat în controlerul de robot. Din acest moment nu mai este
nevoie de PC, robotul este manipulat de controlerul de robot
Doriţi să dirijaţi şi alte accesorii? Nici o problemă. SPEL+ nu dirijează numai robotul, deoarece
este capabil să opereze mai multe sarcini (multitasking) paralel cu robotul sau independent de acesta.
Dirijarea complexă a mişcării
SPEL+ cuprinde numeroase posibilităţi: PTP (point-to-point, adică mişcare de la punct la punct), mişcare lineară, CP (continuous path, adică mişcare continuă), etc, sau mişcări speciale, de ex. Jump (săritură) sau Pallet (paletizare).
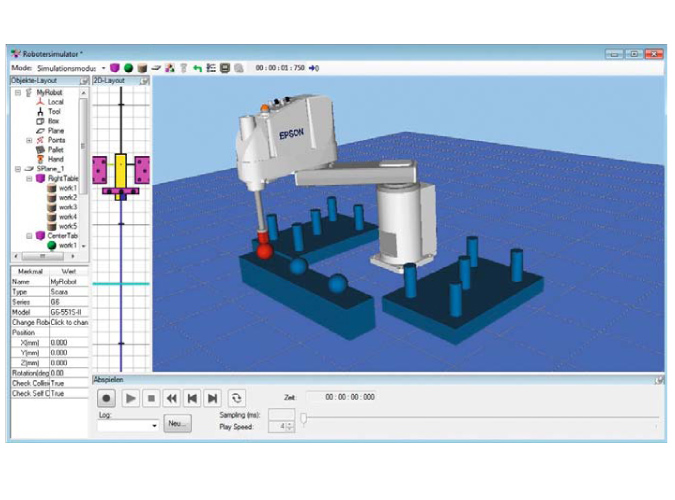
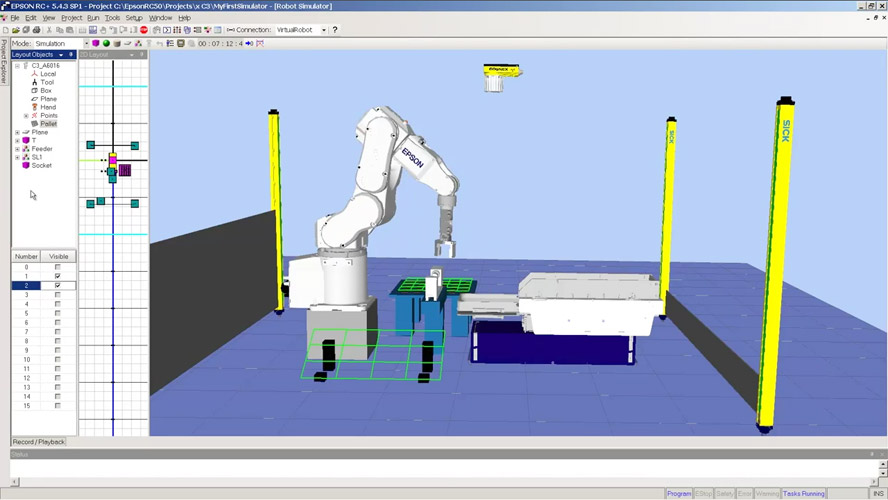
Simulator robot, să puteţi planifica dinainte
Proiectaţi-vă procedurile dinainte şi probaţi-le pe calculator, înainte ca robotul să ajungă la Dumneavoastră. Cu simulatorul integrat în mediu RC+ puteţi proiecta exact şi sigur celula de robot, puteţi calcula duratele ciclurilor. Puteţi elabora plan de implementare înainte ca să fabricaţi o singură piesă. În simulator puteţi construi elementele necesare aplicaţiei cu file-uri CAD de 3D.
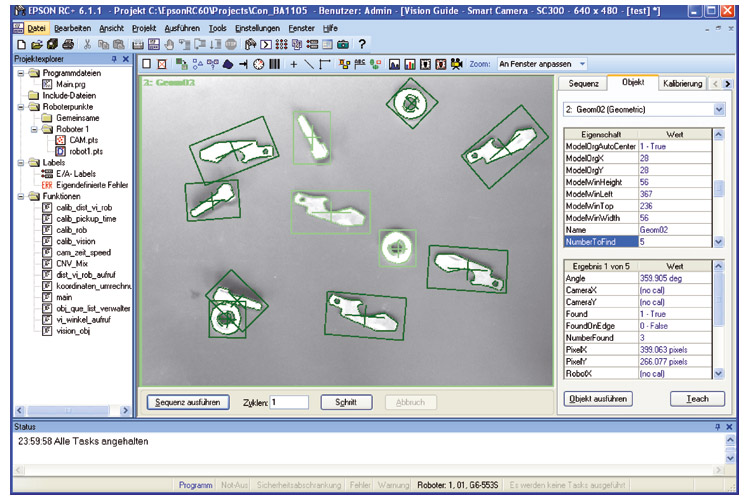
Sisteme EPSON cu cameră
CV1, Compact Vision
EPSON dispune de sistem propriu cu camere, care se poate
conecta şi integra uşor în sistemul cu roboţi. Pentru sarcini cu cameră standard vă recomandăm
sistemul CV1 Compact Vision.
Sistemul compact CV1 a fost dezvoltat la sarcini cu cameră
standard. Se poate comanda cu două feluri de camere USB: cameră standard (640 x 480 pixeli) şi camere
cu mare rezoluţie (1280 x 1024 pixeli), pentru sarcini mobile sau fixe la fel. În vederea elasticităţii
şi distanţei focale maxime se poate comanda cu lentile şi adaptoare de lentile.